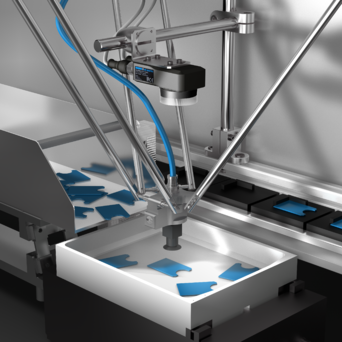
Lokalisieren und Greifen
Vision Sensoren eignen sich zur Positionsermittlung von ebenen Objekten, welche sich auf einer von hinten beleuchteten Vibrationsplatte befinden. Zunächst wird der Vision Sensor CS-60 auf ein Objekt eingelernt. Der CS-60 ermittelt und überträgt die X/Y-Koordinaten und die Drehlage des am besten geeigneten Objektes über PROFINET, Ethernet TCP/IP oder RS 232 an einen Roboter, der das Objekt greift und ablegt. Findet der CS-60 keine lokalisierbaren Teile im Arbeitsbereich mehr, werden neue Objekte über das Fördersystem zugeführt.
